カーナビゲーションなどで使われる、地図データベースの国内最大手のゼンリンは、このほど、日本自動車ジャーナリスト協会(AJAJ)会員向けに勉強会を開催。同社が自動運転に向けて地図データベースから支援できる技術を開発していることを明らかにした。
◆ADAS実現に向けた高精度地図データベース
自動運転については、Googleが実現時期を2017年と発表するや、自動車メーカーも交えた熾烈な開発競争がスタートした。ただ、進捗状況として報告されるのは車両側の制御に終始することがほとんど。それを支える地図データベースの整備も欠かせないことはあまり知られていない。今回の勉強会は、そのADAS(先進運転支援システム)に向けた技術開発に取り組むゼンリンの今を知るために開催された。
ゼンリンによれば、「ADASの高度化・自動走行機能を実現」するためには、「外部環境認識の確度を上げる」ことが欠かせないという。それには「車両センサ技術とインフラ情報を含めた動的情報」と、「高精度な位置情報を有する静的データベースの組み合わせ」が欠かせず、それらは官民協調で検討が進められていながらも、ゼンリンは“地図屋”として、このデータベース整備で様々な取り組みをスタートさせている状況にある。
現在普及が進み始めている衝突被害低減ブレーキでは、縦方向のクルマの制御は技術的にもカメラ等のセンサーで実現済みだ。しかし、車線変更や分岐合流、交差点への進入・退出など横方向の動きに対しては未対応のままだ。その実現にこそ、ゼンリンが開発する高精度な地図データが役立つ。
◆時空間システムと高精度空間データベースが自動運転のキーに
そもそもゼンリンが考える自動走行システムとは、人間の運転行動「認知」「判断」「操作」をクルマが代わりに行うものを指す。「認知」はカメラーやレーダーなどが、「判断」はAI(人工知能)が、そして「操作」を車両側のアクチュエーター(駆動装置)が司るのだ。ドライバーは本来、無意識のうちに先の3つのアクションを行い、「ロケーション」「環境認識」「先読み」につなげてきたわけだ。
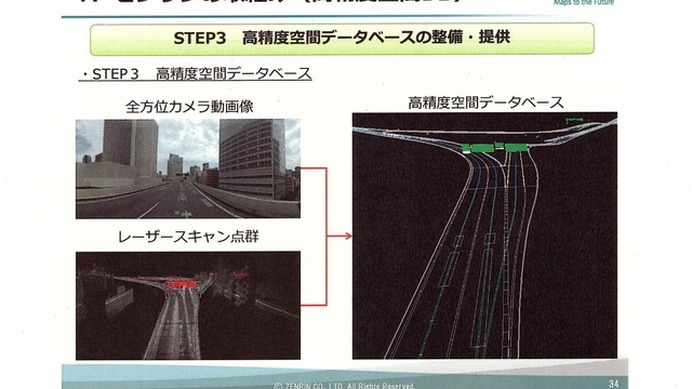
これを背景として自動運転の実現に向けてゼンリンが取り組んでいるのは大きく分けて二つある。一つは、自動走行時代の情報提供に対応する地図整備システム「時空間システム」と、高度な安全運転支援システムに向けた「高精度空間データベース」の開発だ。
「時空間システム」は、収集した地物(交通に直接関係する交通標識や歩道橋、道路の車線など)を一元管理し、ここから必要な情報を選択してデータベースを生成。それを要件に応じて最適化し、新旧を比較した差分データをリアルタイムで提供していくシステムを指す。
「高精度空間データベース」は既に提供しているADASデータベースを発展させる形で進めていく。ゼンリンはこれまで全国に配備した計測車を使って様々な地物を収集しており、それに使う計測車は数十台に及ぶという(具体的な台数は明かされなかった)。そのデータは既にカーナビ等の交通規制情報として反映されており、一時停止に近づくと自動的に警報としてドライバーに告知してきた。
◆既存の資源やインフラ管理の情報を有効活用
この情報を基にゼンリンは、一般道/高速道の上下線や複雑に交わる車線などを含む道路/車線ネットワークとして整備。次のステップとして、1台あたり1億円を軽く超えるという高性能な計測車でレーザースキャン点群や全方位カメラ動画像を収集してデータベースを完成させていく。これが「高精度空間データベース」となるのだ。
これらのデータベースはあくまで実験段階であって、作成されたデータベースは現状、一部エリアに限られる。実用化までには技術的にも運用面でも課題は数多いが、「既存の資源やインフラ管理の情報を有効活用したプラットフォーム作りは日本ならではの強み(ゼンリン)」。今後は2020年の自動走行技術の実用化に向け、データベースの検討・開発は加速していくものとみられる。
《会田肇@レスポンス》
page top